
Thinking about the next one - tilt steering concept.... maybe?
I can see there is lots of room for improvement now that I have played with this SegBot
The things I would change are:
Use more suitable motors maybe two hub motors at less 450 watt
Go with 16" wheels (minimum)
Design for Li-ion technology
Put more thought into the steering control
_______________________
To start, I will look at some concepts to improve the steering control
The genuine Segway uses a patented "Lean" steer configuration which is well thought out
The upright is also curved as shown above
The following is an idea that stems from a conversation with a friend about simple ways to create a self centring mount for the upright.
As it turned out, he had actually developed such a device for some agricultural equipment that ended up being replaced with a different style of device.
He kindly gave me one that somehow missed out from being added to the scrap metal recycling.
The pictures below indicate how I might use it in the next version of my SegBot.

Here is the self centring hardware in its original form.....

It would require shorting to about 140mm and the base receiver (50mm diameter) for the upright would be positioned as shown above
The next version will use a much larger diameter upright tube curved of suit....
Note that I plan to use a second Accelerometer on the upright (using the "Y" axis of the first Accelerometer as a reference) to sense the angle of the upright.
The Accelerometer I tested works well as an inclinometer (common sensor technologies for tilt sensors and inclinometers are accelerometer)
This also makes centring, scaling and sensitivity easy to control in the code of the Arduino sketch.
Simple operation!
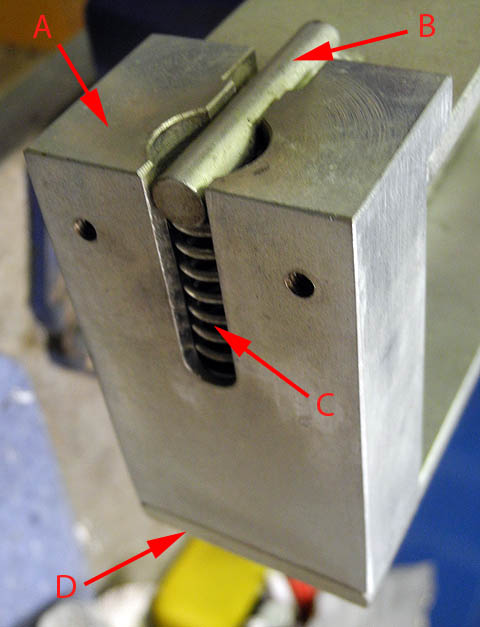
A - Machined end housing (2 used)
B - Swivel plate with 2 round shafts welded onto the plate (one each end)
C- Two springs (one in each end housing) push the plate upwards against the stop on the end plate
D - Removable bottom plate the allows for the springs to be inserted
In the upright positon
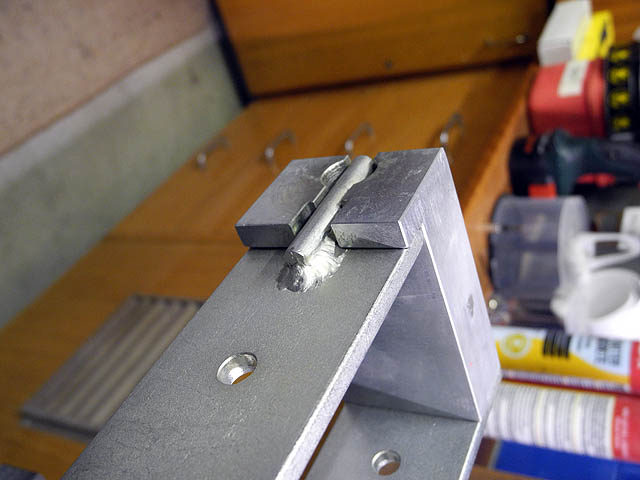
Upright tilted to the left....

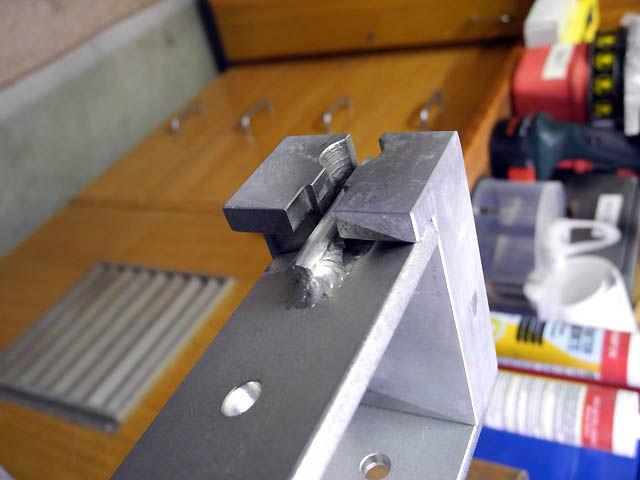
Upright tilted to the right....
Some of the advantages are:
Very positive upright position
Tension seems perfect for the length of the upright used for testing (can easily be set using springs of a different tension if required)
Some "forced" feedback happens by nature of the arrangement (more by luck!) giving it a nice "feel"

The cut down version will look like this and the base plate will be part of the new frame....