Prototype version 2 will be needed !!!
WHY???
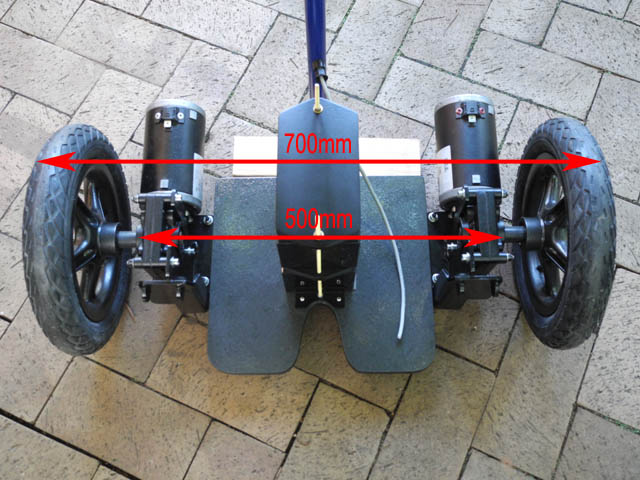
In trying to keep the platform low and using the original motor mounts upside-down
the width becomes far to wide once the wheels are fitted.
(700mm is too wide for my application)
I will now make a second version with the motor mounts reversed
this will increase the height of the platform but bring the overall width back to 500mm.
Batteries will now be mounted under the platform and the structure will look very similar to JD's concept.....
The second problem!
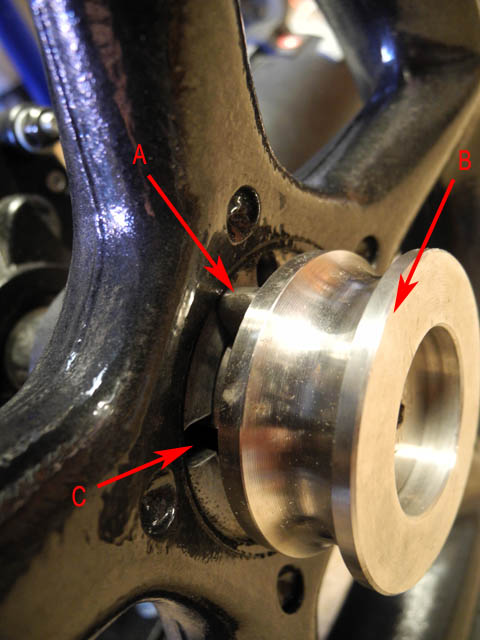
Most of these wheelchairs use some sort of wheel disengage arrangement
The one used on this chair is shown above.....
Hub (B) is spring loaded - when the "dogs" (2 off) (A) fit into the wheel rim (C) the wheels are engaged.
This arrangement works well on an electric wheelchair but by nature of the design, there is
some free play between the "Dogs" and the mating slots in the centre of the rim.
This will clearly be a problem in the SegBot project.